




全般に必要なセンサや計測システムの研究を行っています. 例えばロボットが仕事を行うためには人間と同じように目や手が物にふれた時に感ずることのできる機能が必要です. 私たちはそれらの視覚や感覚に換わる機能を持つセンサや技術の開発を行い,それらをどのように用いればより人間に 近づくことができるか,あるいは人間の能力を凌駕するような働きができるかについて日々,研究を行っています.
この研究室で研究することは,未だ誰も成し遂げていない,謂わば未来の技術の創造することです.
私たちと一緒に研究してみませんか?
この研究室で研究する日々は将来あなたが進むべき道に繋がっていくはずです.
望むべき道に進めるよう,キャリアアップのための大学院進学も積極的にサポートします.
機械情報学研究室であなたの未来を創ってください.
私たちの研究室では移動ロボットを用いたインフラ点検システムの構築や,画像処理技術を用いたひび割れなどの検出を行っています.
また,生体ハンドリングシステムなどの医療のための補助システムを制作しています.
〒930-8555 富山県富山市五福3190 富山大学 工学部 機械知能システム工学科 五福キャンパス 機械系実験研究棟G1,6階
Gofuku 3190, Toyama-shi, Toyama 930-8555, Japan. Department of Mechanical and Intellectual Systems Engineering, Faculty of Engineering,University of TOYAMA
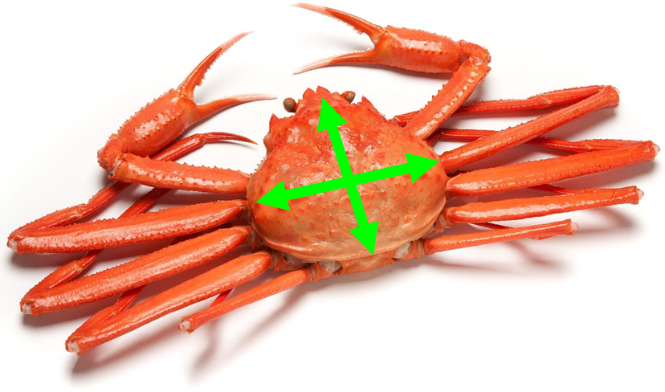
富山県の特産品であるベニズワイガニは資源状態が悪化していると考えられ,資源の回復にむけた早急な資源管理が求められている.ベニズワイガニは甲羅の大きさが資源管理において重要な指標の一つである.調査につき測定対象数が膨大であることから,従来のノギス計測では測定者の負担が大きい.そこでRGB-Dカメラを用いた計測支援システムの開発をしている.甲羅領域を三次元データとして認識することで大小異なるベニズワイガニの計測が可能となる.
距離画像データから抽出できる様々な情報は、機械学習において有用な特徴量として扱え得ることが多い。しかしカラー画像データセットと比べて距離画像データセットは一般に公開されている数が少ないといった問題がある。そこで本研究ではカラー画像データセットを距離画像に変換することを目的とする。GANの一種であるCycleGANを用いるコトで一対一のペアが存在しない状況でも距離画像への変換が可能となり、柔軟な距離画像データセットの作成を可能とする。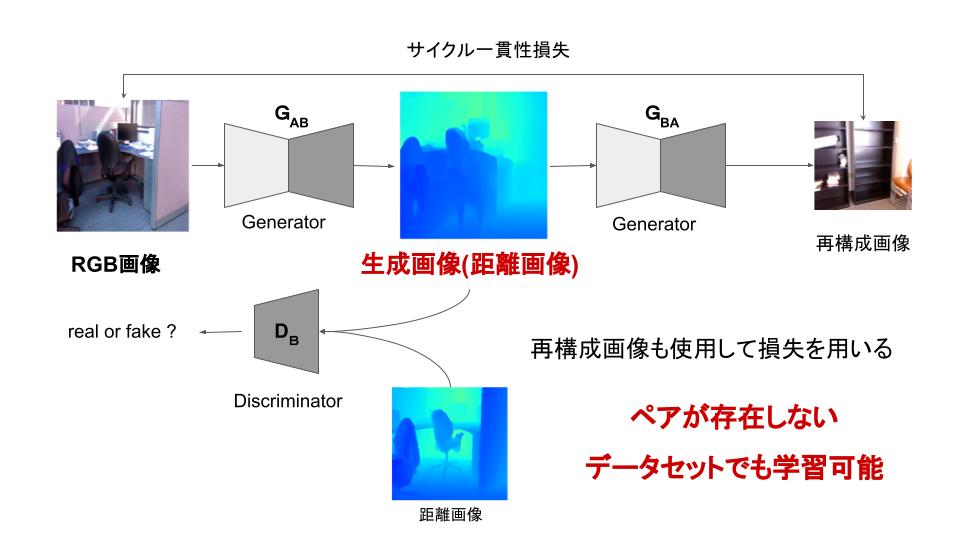
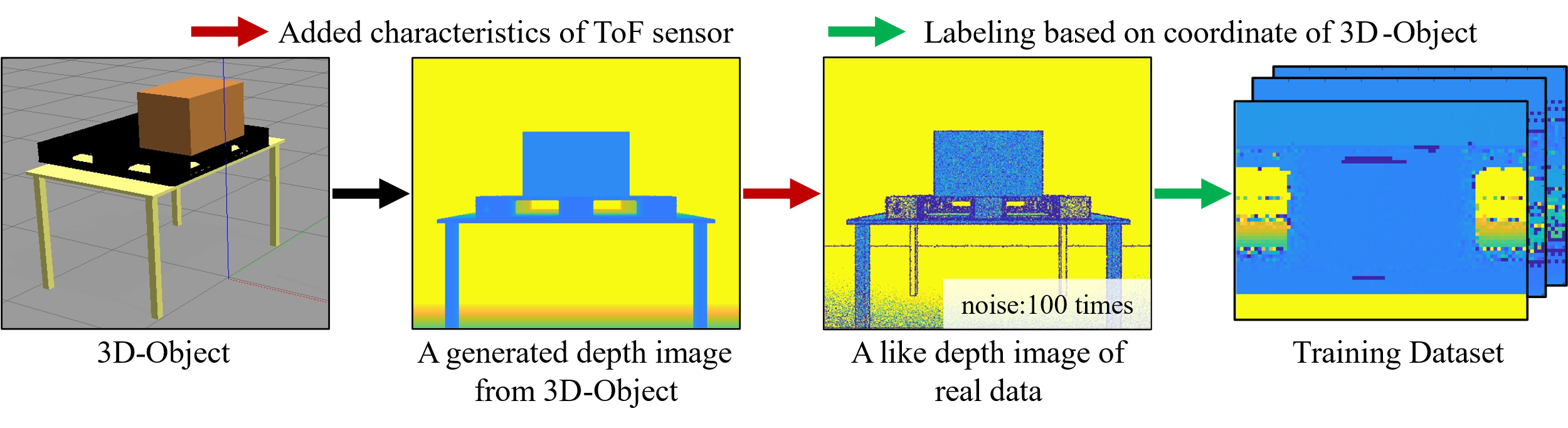
機械学習には大規模な学習データが必要であり,人の手で作られることが多く,コストが掛かることが問題となっている.そこで,実際の撮影なしで学習用の距離画像を生成することを研究している.3次元モデルから得られる誤差のない距離画像と距離画像センサの計測特性を組み合わせることで実際に撮影した様な距離画像を生成する.この手法で作成した距離画像をパレット検出に応用することで,物流現場で用いられる多種多様なパレットに対応できることが期待できる.
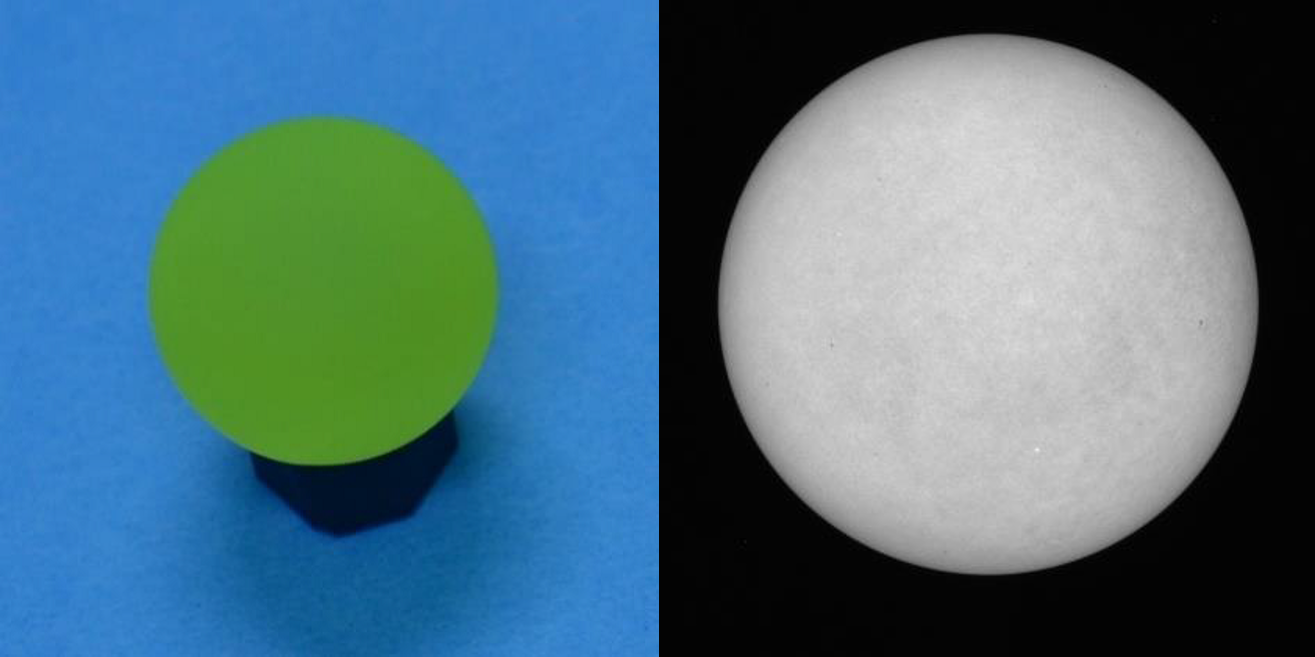
光学式マーカを用いた三次元画像計測の精度向上により応用範囲の拡大が期待できる.本研究室では,計測精度向上に向け,「蛍光球体マーカ」を用いた計測を行っている.蛍光球体マーカは,中心検出の精密さ・正確さにおいて10-3pixelオーダーで検出可能である.また,中心検出精度から三次元画像計測において相対精度10-6オーダーでの計測が期待されている.
〇 高精度な三次元画像計測のための蛍光球体マーカ検出の耐遮蔽性向上
光学式マーカへの遮蔽物の映り込みによる計測精度低下が問題視されている.そこで本研究では,10-3pixelオーダーで検出可能な蛍光球体マーカを用いて,対遮蔽性を向上させた検出手法の確立を目指す.また,マーカ遮蔽時でも10-3pixelオーダーでマーカを検出することを目指す.
〇 高精度な画像計測のためのレンズの傷・汚れの認識—蛍光球体マーカを想定した検討—
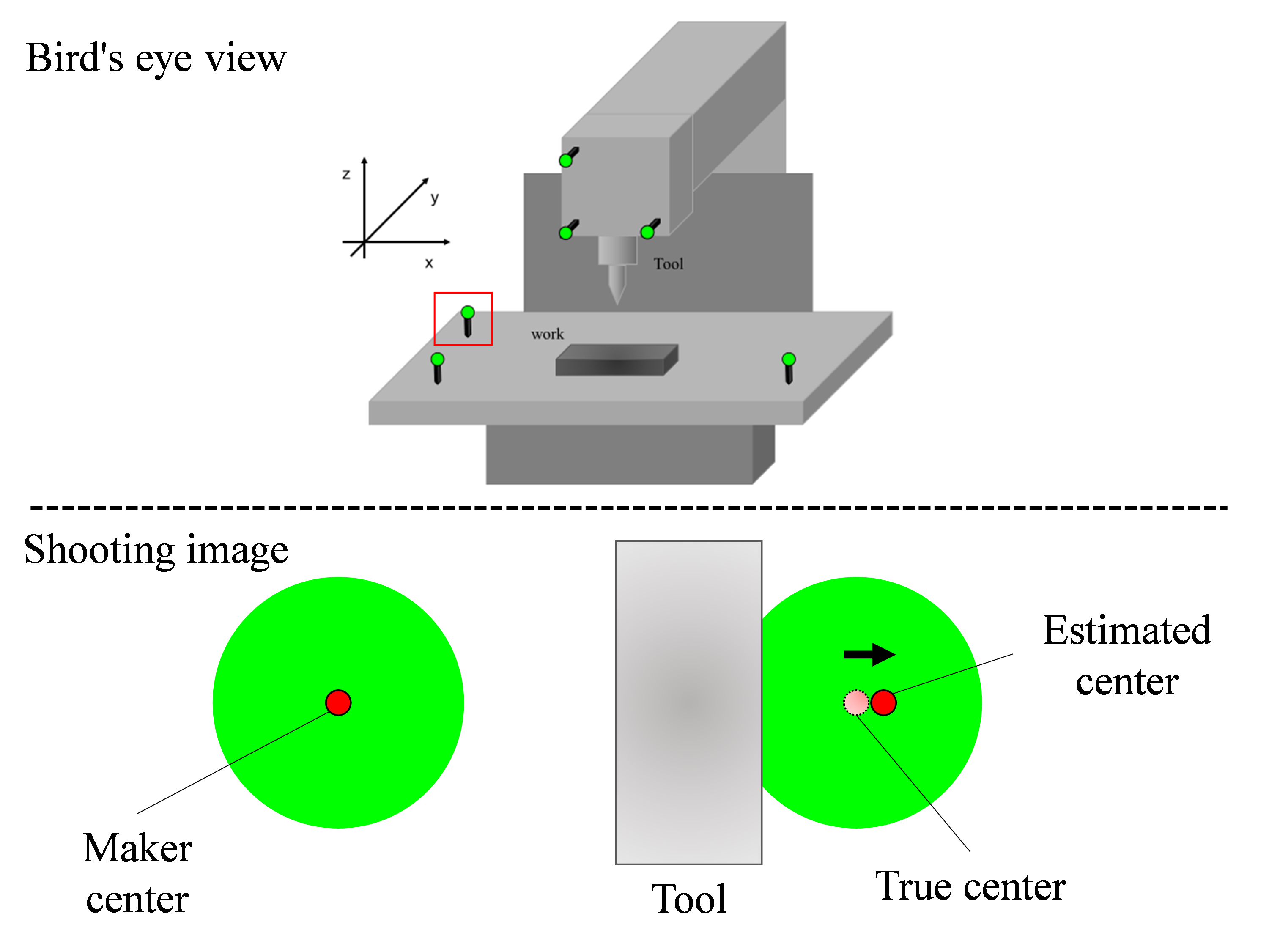
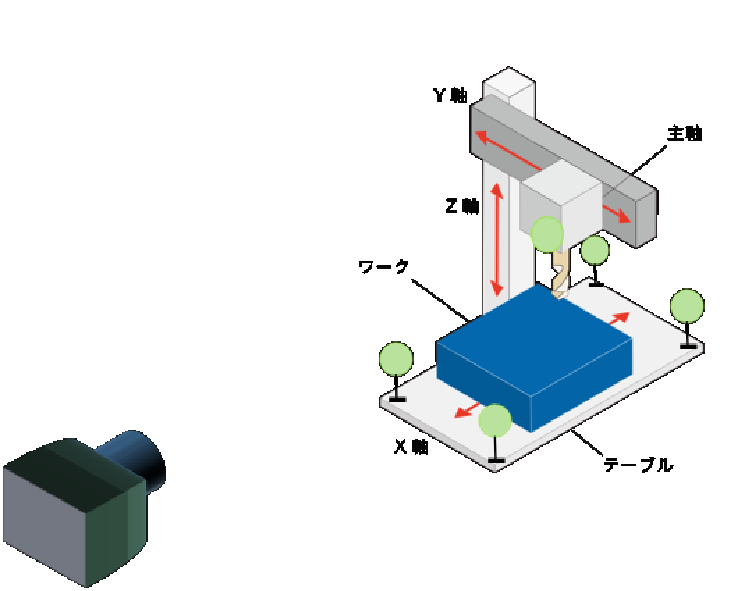
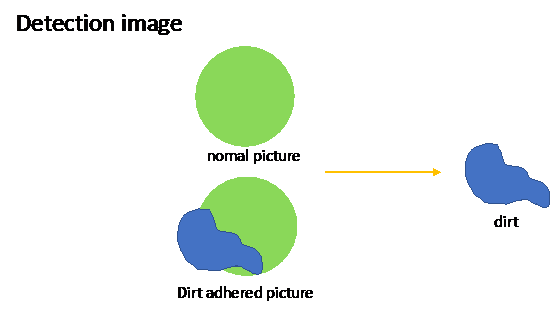
三次元画像計測手法を応用することで,工作機械の無人運転化が期待できる.しかし,無人運転化するためには環境の温度変化やワーク加工時の機械自身の熱膨張問題などの異常検知に対して,すぐに自動で制御できる技術が必要になる. 10-3pixcelオーダーの高精度検出できる蛍光球体マーカを使用して,工作機械の異常検知を高精度に検出するため,本研究では蛍光球体マーカやカメラに,ワーク加工中に付着する汚れの検出や度合いの検出手法の確立を目指す.
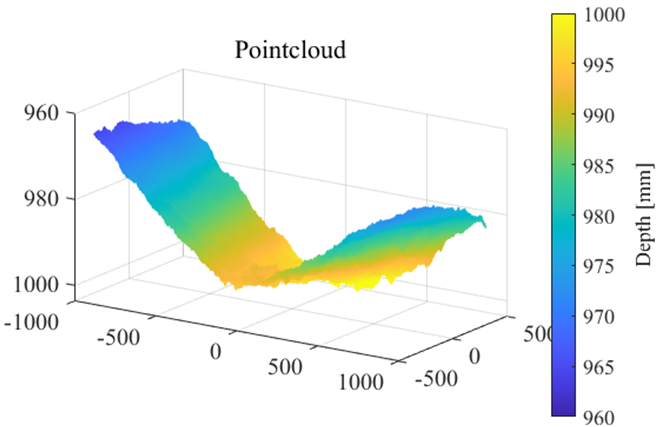
大型構造物の3次元計測は未だ発展途上にあり,その3次元計測の中の1つである平面度計測においても作業効率の向上や人手不足の解消の観点から,平面度計測の自動化が必要不可欠である.そのため,測定対象物の3次元情報が取得できる距離画像センサを用いて平面度計測の自動化を試みる.その際,距離画像の校正方法に注目し,校正精度を向上させることで,平面度計測の高精度化を目指す.
舟状骨骨折は手根骨骨折の大半を占めている。また、この骨折は細かい骨の集まりであるため、難しい手術となっている。そのため、舟状骨骨折の手術は治療する医師の経験に基づいて行われている。しかし、近年CT画像の撮影による高精度な生体情報を取得することが可能となった。その情報を利用し、骨折治療支援のための固定具位置の定量的評価また医師への提示を目的とした取り組みを行っている。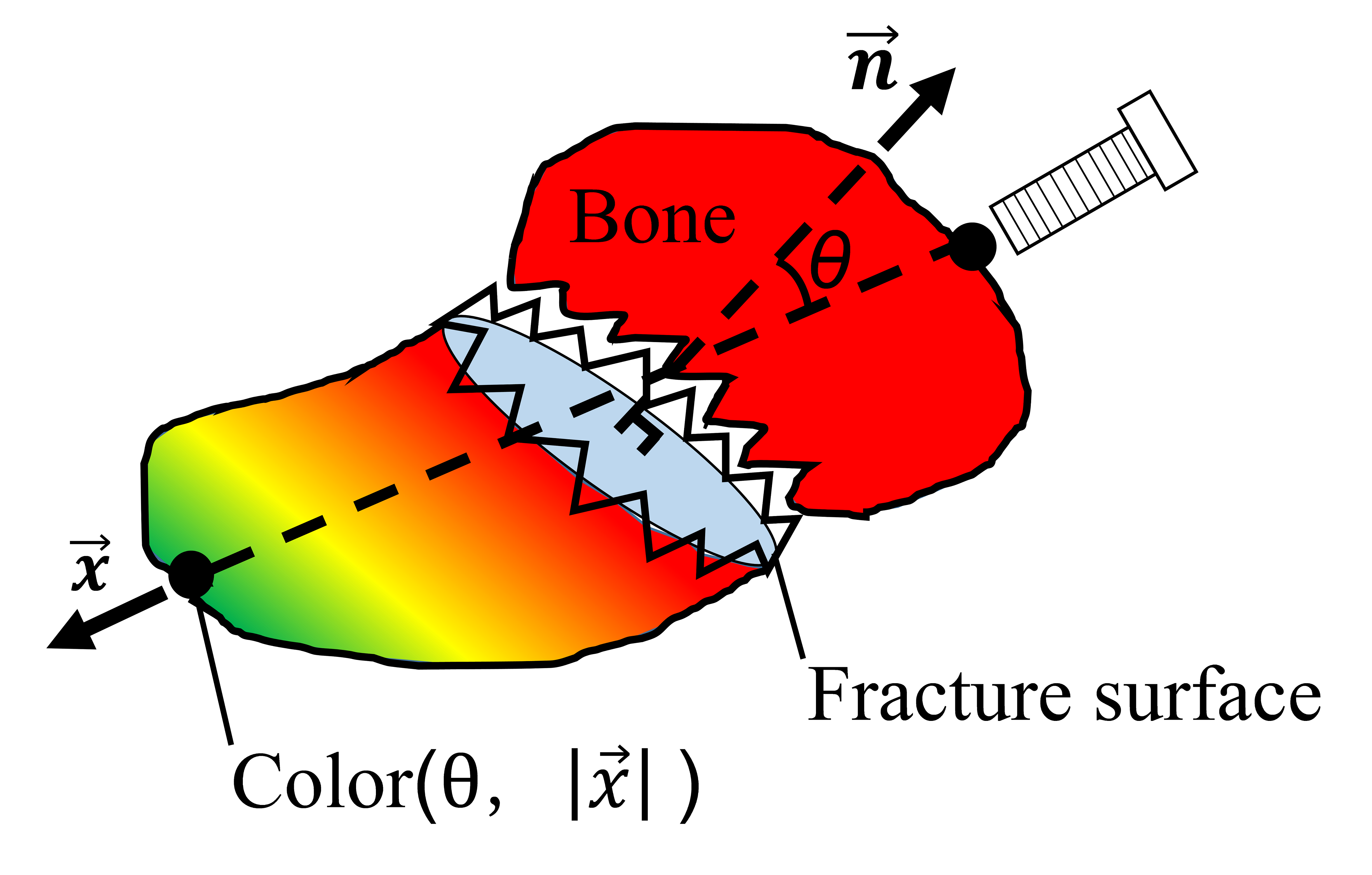
がんは日本人の死因第一位で,死亡者数も増加傾向である.がん診断において,従来から行われているBiopsy (内視鏡・針で組織を採取し診断)の患者負担を低減したLiquid Biopsy(血液などでの診断)が注目されている.中でもCTCは血中に流れ出たがん細胞で,モニタリングすることにより治療の評価や,予後予測因子として有用とされている.本研究では機械学習を用いてCTCの高精度な検出や学習データ取得時の負担軽減,患者の予後予測の実現を目指している.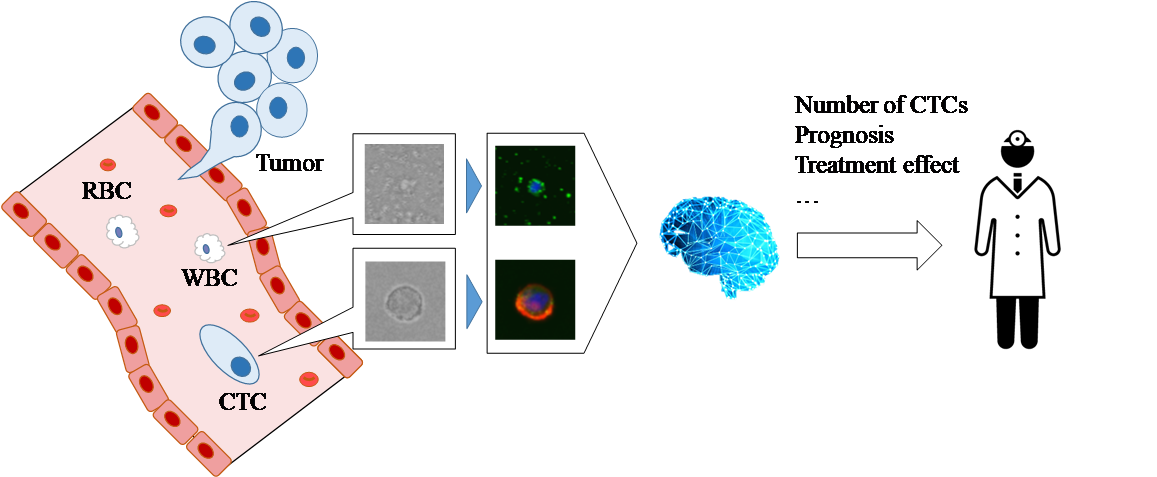
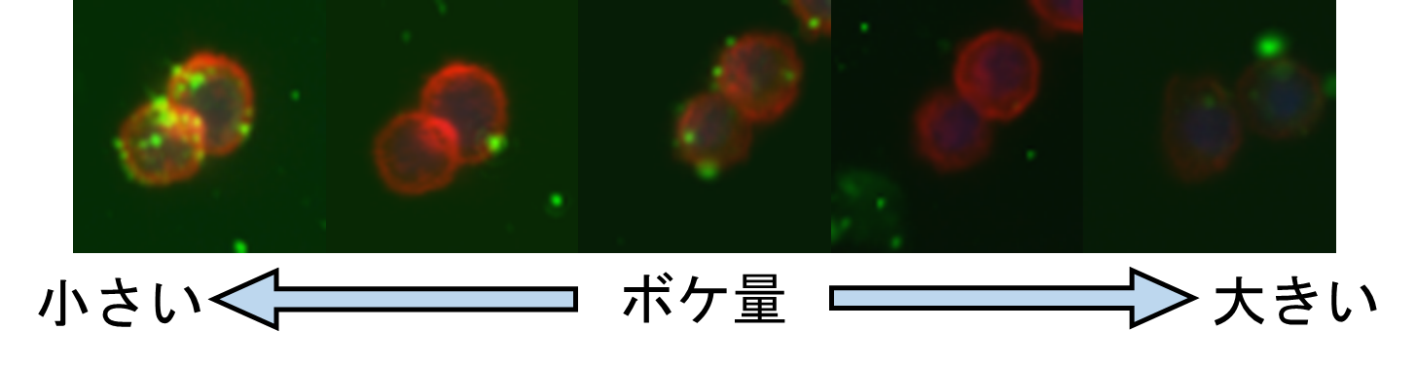
〇 画像撮影時における撮影負担の軽減に向けて
採血した血液からCTCを撮影する際,ピントのあった画像の方がCTCの特徴を認識しやすく高精度な分類が可能である.しかし撮影枚数が膨大になり撮影時間が長時間になるという欠点がある.そこで,ピントのぼけた画像からでも効果的な特徴を抽出し高精度にCTCを識別するモデルを構築する.これにより撮影時間の短縮が可能となり,撮影負担の軽減に繋がる.結果的に CTC画像診断の実用化・普及に一歩近づく事ができる.
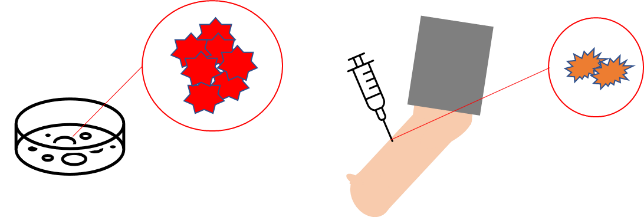
〇 少数のCTCデータでの高精度な分類・検出に向けて
CTCは癌患者の血液1mlあたりに数個(白血球は数千個オーダー)しかなく,まとまったデータ数の確保が難しい.機械学習を用いる上でデータ数は非常に重要であり,少なければデータの効果的な特徴を抽出できず,モデルの精度向上が難しい.そこで任意の個数手に入れられる癌細胞を培養した癌細胞株を用いて学習を行い,そのモデルをCTC用に転用する.これにより少ない量のCTCデータで高精度な分類を目指す.
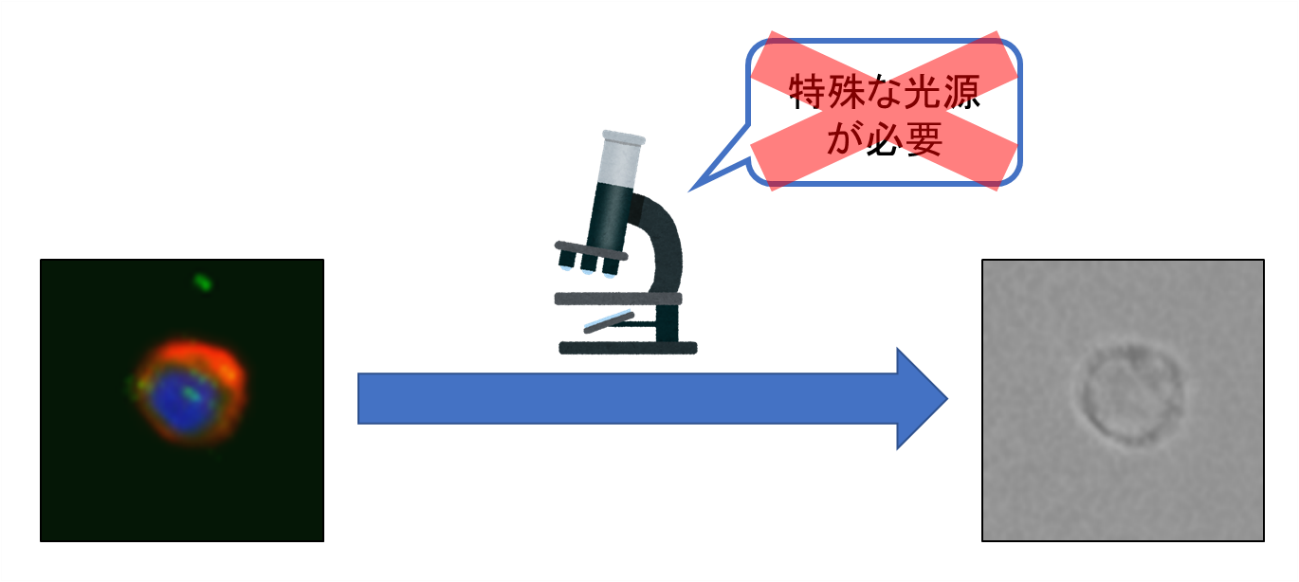
〇 CTC検査の普及に向けて
現在,細胞の検出及び分類には蛍光画像と呼ばれる細胞の特徴に反応する抗体により染色された画像を用いて研究を行っている.しかし,蛍光画像取得には蛍光顕微鏡と呼ばれる通常の顕微鏡と比較して普及していない機器が必要である.そこで一般的な顕微鏡によって取得可能な明視野画像を蛍光画像の代わりに使用することを目的とし,明視野画像を使用した細胞分類の高精度化に取り組んでいる.
魚眼カメラは視野角が180°のため,1台で広範囲を撮影することができる.魚眼カメラを用いた計測手法の1つとして,時空間画像解析がある.これは魚眼カメラが直進方向に移動させながら撮影し,画像を時系列に並べることで時空間画像(下図参照)ができる.この時空間画像によって3次元の位置情報が取得され,幾何学的に計測可能である.利点として,遮蔽物によって観測不可能な場合でも特徴点の推定が可能である.ただし,魚眼カメラで撮影した画像には大きな歪みが存在するため,計測精度の向上には魚眼カメラの歪み特性を表す射影特性を正確に取り扱う必要がある.
昨今, 自動運転に代表されるように様々な分野で自動化が進んでいるが, 医療分野の自動化は遅れている. この原因として, 安全性や衛生面の影響も大きいが, 手術や診断が過去の症状と医師の経験によるものが多く, 一般化がされていないことも原因である.そこでロボットによる自動的な手術を見据えたセンシング機能を有した鉗子を提案する. これによって術者への触覚のフィードバックの他, 把持データを集積する事で定量的な診断や手術が期待できる. 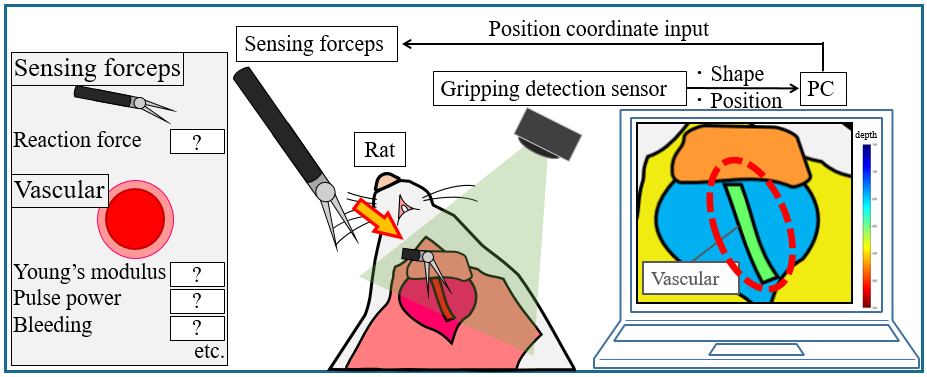
高度経済成長期以降に建造されたインフラ構造物の老朽化から点検の需要の増加が見込まれている.作業者の近接目視や打音検査によって行われているが,高所での作業が危険であること,客観的な評価ができないこと,足場設置に時間がかかることなどが挙げられる.本研究室では,橋梁点検における亀裂の測定方法としての画像処理システムを構築し,安全な点検,客観的な評価,点検作業の簡略化の実現を目指す.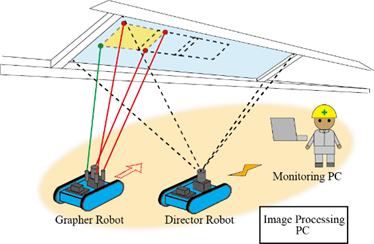
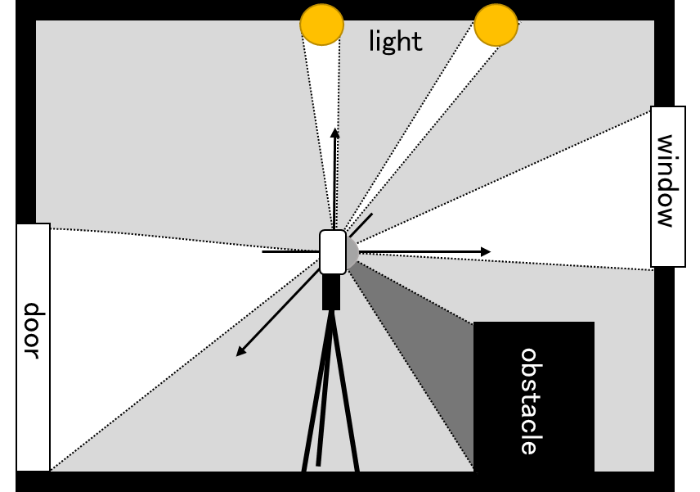
生物はリアルタイムに自らの状況を認識し必要な動作まで行うことができる.近年の認知科学では,生物は環境の光の状態から,周辺物体の知覚を行っていると考えられている.動物の外界認識のメカニズムを画像計測技術に適用することで,画像計測における入力から計測までの中間層である対象抽出の過程を,省略または簡略化したプロセスが実現可能となり,画像処理技術分野において革命的な転換を図れる可能性を持つ.

笹木 亮教授
Tohru SASAKI
略歴
2016年04月-継続中
富山大学 学術研究部 工学系 教授
学位・資格等
2004年02月 – 博士(工学) 東京大学
専門分野
計測工学
精密機械システム
制御・システム工学
プロフィール
金沢市出身

寺林 賢司准教授
Kenji TERABAYASHI
略歴
2017年04月 – 継続中
富山大学 学術研究部 工学系 准教授
学位・資格等
2008年03月
博士(工学) 東京大学
専門分野
ロボットビジョン
三次元画像計測
プロフィール
北海道出身

桐 昭弘技術専門員
Akihiro KIRI
略歴
2025年04月 –
富山大学 研究推進機構 研究推進技術本部 理工学部門 部門長
学位・資格等
2000年09月 有機溶剤作業主任者
2010年04月 JIS Z2305 非破壊試験技術者 UT2
2011年04月 JIS Z2305 非破壊試験技術者 ET1
2013年10月 材料試験士(疲労試験)2級(日本材料学会)
2018年11月 JUIDA無人航空機安全運航管理者
2025年07月 二等無人航空機操縦士(国土交通省航空局)
プロフィール
富山県出身

Ahtehshaam AyoobM2
プロフィール
研究テーマ
Fluid flow visualization using Electorostatically implanted Microfibers
原田 遼之祐M2
Ryonosuke HARADA
プロフィール
研究テーマ
外観画像による溶接品質検査
小道 文也M2
Fumiya KOMICHI
プロフィール
研究テーマ
UAVを用いた橋梁点検のためのVisual SLAMの改善
坂本 啓明M2
Noriaki SAKAMOTO
プロフィール
研究テーマ
蛍光球体マーカを用いた画像計測におけるマーカ変位によるかたより補正
新谷 悠斗M2
Yuto SHINYA
プロフィール
研究テーマ
手術支援ロボットのための病変部位の3次元位置取得方法の検討
田中 大翔M2
Hiroto TANAKA
プロフィール
研究テーマ
RGB-Dセンサを用いたベニズワイの寸法計測における位置姿勢頑健性の評価
布施 駿M2
Syun FUSE
プロフィール
研究テーマ
大型構造物の形状計測のための高精度な距離画像センサ校正
武舎 慶矢M2
Keiya MUSYA
プロフィール
研究テーマ
橋梁架設現場における差異検出システムの構築
山田 悠翔M2
Yuto YAMADA
プロフィール
研究テーマ
術野記録用ウェアラブルシステムの開発
加藤 晃健M1
Koken KATO
プロフィール
研究テーマ
ベニズワイの甲幅端点座標の補正による高精度な画像計測
多田 悠一郎M1
Yuichiro TADA
プロフィール
研究テーマ
出血状態把握のための血流測定機構の開発
谷澤 壮太M1
Sota TANIZAWA
プロフィール
研究テーマ
術野記録用ウェアラブルシステムのための画像処理を用いた映像補正方法の検討
牧 千夏M1
Chinatsu MAKI
プロフィール
研究テーマ
光学画像を用いた臓器判別システムの構築
松坂 直M1
Nao MATSUSAKA
プロフィール
研究テーマ
機械学習を用いた橋梁構造材の孔検出の検討
皆川 幹太M1
Kanta MINAGAWA
プロフィール
研究テーマ
ドローンの自立飛行制御のための画像を用いた人検知
吉井 悠人M1
Yuto YOSHII
プロフィール
研究テーマ
屋外環境における距離画像センサを用いた高精度な姿勢計測
浅井 進志B4
Shinji ASAI
足立 俊輔B4
Shunsuke ADACHI
磯道 祐喜B4
Yuki ISOMICHI
太田 優輝B4
Yuki OTA
西能 玄B4
Gen SAINO
境 一駿B4
Isshun SAKAI
高橋 拓也B4
Takuya TAKAHASHI
野中 優B4
Masaru NONAKA
深美 祐介B4
Yusuke FUKAMI
本田 千紘B4
Chihiro HONDA
山下 凌央B4
Ryo YAMASHITA
LEE SHUYEEB4