
ロボットアームの制御と知能化プラットフォームによる自動倉庫の実現
多解性を許容するロボットアーム制御法の構築,その運動の安定性解析
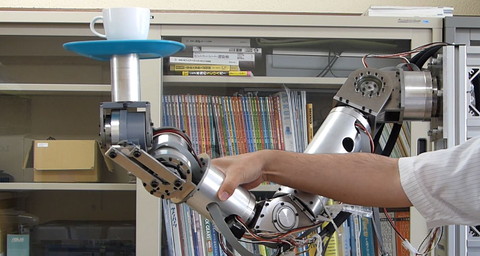
ロボットアーム作業では,作業環境の僅かな変化や不意の接触に対する適応性が課題となっている.作業に必要な変数のみを制御し,ロボット自身に動きの余力を残しておくことで生じる冗長自由度の適応性に着目する.この特性を効果的に用いる制御法および運動の安定性解析,接触に対して手先状態を維持するサービスロボットやロボット本体部が環境と接触せざるを得ない遠隔ロボットの実証実験を行っている.


松村 嘉之教授
Yoshiyuki MATSUMURA, Professor

関本 昌紘講師
Masahiro SEKIMOTO, Junior Associate Professor
略歴
立命館大学理工学部ロボティクス学科卒業、立命館大学大学院理工学研究科情報システム学専攻(博士課程前期課程)修了、立命館大学大学院理工学研究科総合理工学専攻(博士課程後期課程)修了、立命館大学理工学部助手、立命館大学総合理工学研究機構ポストドクトラルフェロー、富山大学大学院理工学研究部講師,現在に至る
学位・資格等
博士(工学)
専門分野
知能機械学・機械システム
主な業績
※大学院生の受け入れはできません.学生募集要項を確認してください.
木下 功士技術専門職員
Koji KINOSHITA, Technical Specialist