

"Imagination is more important than knowledge." Albert Einstein
オペラント条件付けを用いたBrain-Machine Interfaceの研究
我々は、近年盛んになりつつあるBrain-Machine Interface (BMI) の研究領域において、BMI訓練中の動物の神経活動変化(学習・可塑性)を解析するとともに、研究より得られるシステム論的な観点を取り入れて、より良いBMIの開発に生かすことを試みている。BMIは脳と機械を直接つなぐシステムであり、脳科学とロボット工学の最先端をつなぐシステムである。また、身体のさまざまな障害を補完する臨床医学的な実用にとっても、脳を解明し人間を理解する上でも実用化が期待されている。
BMIの中でも運動出力型のBMIを取り上げ、神経活動によるロボット制御を目標としている。まずは基礎的研究として、ラットにレバー押し、及び、レバー操作によるロボットの操縦を学習させ、レバー押し中の神経活動を測定した。得られたデータを解析してレバー押しに特徴的な神経活動を抽出し、最終的にはラットの神経活動のみでロボットを動かすことを目指している。

学習メカニズムの多重性と階層的制御
脳の機能を理解するためには、個体の行動から神経回路、神経細胞及び分子にわたって各階層を対応付けながら統合的に研究を行うことが求められる。瞬目反射条件付けはそのような研究を展開可能な有望な学習課題である。
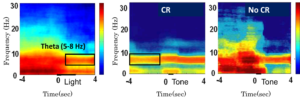
瞬目反射条件付けは、音(CS)とまぶたへの侵害刺激(US)の組み合わせにより、音を聞くだけでまぶたを閉じるようになる連合学習である。この学習は、その構成要素となる下位神経回路が比較的良くわかっていることが特徴である(Fig. 1)。この単純な運動反射の獲得および維持には小脳および脳幹が最も重要な役割を果たし、さらに、CSとUSの時間関係を変えるだけで海馬・内側前頭前野(mPFC)に対する依存性が増大する。瞬目反射条件付けは、連合学習に関与する複数の神経領域の構造と機能、及び、それら領域間の相互作用を神経回路レベルで研究することを可能にする有望な実験モデルである。現在、海馬依存性が異なる複数の学習課題(遅延課題、トレース課題、文脈依存的弁別課題)を用いて、集団的神経活動である海馬シータ波の役割を研究している。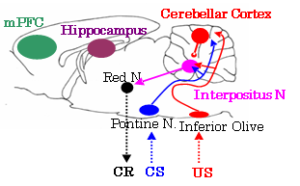

川原 茂敬教授
Shigenori KAWAHARA, Professor
略歴
東京大学薬学部卒業、同大学大学院薬学系研究科修士課程修了、同研究科博士課程中退、同大学薬学部助手、博士(薬学)取得、助教授、富山大学大学院理工学研究部(工学)教授、現在に至る
学位・資格等
博士(薬学)
専門分野
行動神経科学
主な業績
プロフィール

臼井 弘児技術職員
Koji USUI, Technical staff
主な業績